Aorde
z
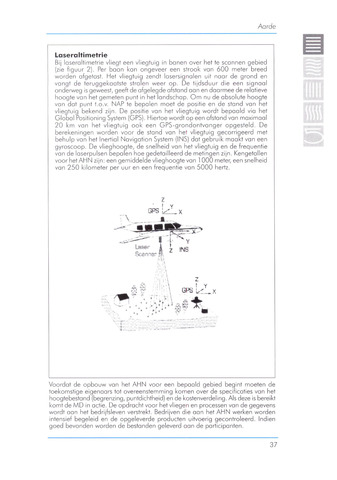
Laseraltimetrie
Bij laseraltimetrie vliegt een vliegtuig in banen over het te scannen gebied
(zie figuur 2). Per baan kan ongeveer een strook van 600 meter breed
worden afgetast. Het vliegtuig zendt lasersignalen uit naar de grond en
vangt de teruggekaatste stralen weer op. De tijdsduur die een signaal
onderweg is geweest, geeft de afgelegde afstand aan en daarmee de relatieve
hoogte van het gemeten punt in het landschap. Om nu de absolute hoogte
van dat punt t.o.v. NAP te bepalen moet de positie en de stand van net
vliegtuig bekend zijn. De positie van het vliegtuig wordt bepaald via het
Global Positioning System (GPS). Hiertoe wordt op een afstand van maximaal
20 km van het vliegtuig ook een GPS-grondontvanger opgesteld. De
berekeningen worden voor de stand van het vliegtuig gecorrigeerd met
behulp van het Inertial Navigation System (INS) dat gebruik maakt van een
gyroscoop. De vlieghoogte, de snelheid van het vliegtuig en de frequentie
van de laserpulsen bepalen hoe gedetailleerd de metingen zijn. Kengetallen
voor het AHN zijn: een gemiddelde vlieghoogte van 1 000 meter, een snelheid
van 250 kilometer per uur en een frequentie van 5000 hertz.
Voordat de opbouw van het AHN voor een bepaald gebied begint moeten de
toekomstige eigenaars tot overeenstemming komen over de specificaties van het
hoogtebestand (begrenzing, puntdichtheid) en de kostenverdeling. Als deze is bereikt
komt de MD in actie. De opdracht voor het vliegen en processen van de gegevens
wordt aan het bedrijfsleven verstrekt. Bedrijven die aan het AHN werken worden
intensief begeleid en de opgeleverde producten uitvoerig gecontroleerd. Indien
goed bevonden worden de bestanden geleverd aan de participanten.
Y
GPS
„Y
Laser
Scanner
37
{kind=link}